Synthetic community [SynCom] transfer for the...

Find out more about the different routes to entry and our eligibility criteria
Previous studies have shown that various animal species interact with passive replicas or interactive robots that mimic their conspecifics. In the case of chickens, filial attachment (imprinting) to robots is observed in young chicks.
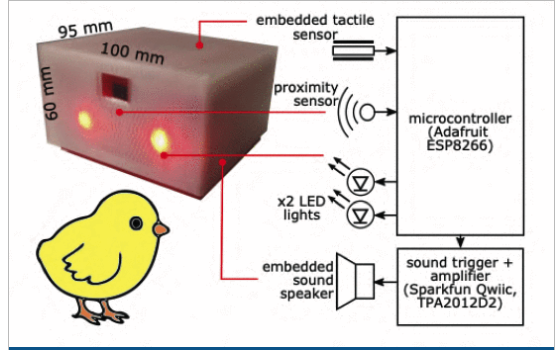
However, the features and functions of the robots that maximize the efficiency of chicken-robot attachment have not yet been identified. Therefore, we designed RoboChick, a simple robot that can be easily customized with different features. Further, we developed a protocol for assessing the attractiveness of each feature. In the current study, we tested the attractiveness of two RoboChick features during robot-chick interactions: the presence of flashing lights and vocalizations in response to chick interactions.
Our proposed protocol proved suitable for assessing the efficacy of the features. RoboChick, which is open and modular, can be easily reproduced by other research groups and adapted to test different features in different experimental conditions.
Several types of interactive robots and animal replicas have been used in the study of social interactions. In experiments with animals, the interacting individuals are crucial elements of each other's environment, yet are nearly entirely out of experimental control. As a result, replicability is difficult to achieve, as repetition of the same experimental conditions within or across subjects is unlikely [1].
The use of robots not only enables good control over experimental conditions, but also allows us to study more complex interactions [2] than just a single stimulus-response scenario [3]. Furthermore, the use of artificial social agents allows to dissect the studied behavior by enabling the researcher to isolate features of the behavior to assess its impact on the overall interaction or to dissociate behaviors from environmental context in which they usually occur.
Previously it was shown that a number of species, such as guppy fish [4], rats [5], dogs [6], and chickens [7] inter- This work was funded by the Alan Turing Institute (General AI and Interactive Robots for Farming grant) and by BBSRC (LIDo studentship for Z.S.) act with robots, exhibiting behaviors that are comparable to those observable in natural interactions. Knowledge of how the studied behavior is expressed in natural conditions is of crucial importance when assessing the suitability of robots for investigating the behavior.
Due to the well-established phenomenon of filial imprinting (the social attraction developed for the first objects experienced after hatching), the domestic chicken Gallus gallus) is a suitable animal model for the study of social interactions [8]. Imprinting is a fast social learning mechanism through which hatchlings develop a strong preference for an adequate interaction partner, in the early days of their life [9]. While imprinting evolved to support attachment to a parent, chicks have been found to imprint on a range of conspicuous biological and artificial objects [8], [10].
